


Aggiornamento del 4 Settembre: ieri JAXA ha comunicato che la manovra di ’Target marker separation’ prevista domani è stata rimandata a data da stabilirsi in quanto la sonda è andata in "Safe-Hold", a causa di un problema ad una delle quattro 'reaction wheel' che sembra ora risolto (lo stato della sonda è tornato normale).
Mentre la missione dell'omologa americana OSIRIS-REx sta entrando nel vivo adesso, con la scelta e l'analisi ravvicinata dei quattro siti sulla superficie di Bennu, candidati per il prelievo di materiale tra un anno, il falco giapponese sta effettuando ormai le ultime manovre nei pressi di Ryugu e dovrebbe ripartire alla volta del suo pianeta natale tra Novembre e Dicembre.
Prima di riaccendere i motori a ioni, però, sono rimaste alcune importanti operazioni da svolgere. Una di queste è il rilascio dell'ultimo robot su Ryugu. Come si ricorderà, i primi due mini-rover, Minerva-II 1A e 1B, si separarono dalla sonda madre il 23 Settembre dello scorso anno, toccando la superficie di Ryugu circa 15 minuti più tardi e scattando immagini spettacolari. Dopo pochi giorni non si seppe più nulla del loro destino, adesso veniamo a sapere che i due rover erano andati in uno stato di "ibernazione" a causa dello scarso irraggiamento solare. In effetti, come spiegato in dettaglio nell'articolo dell'amico Michele Diodati, questa era una misura necessaria in quanto, essendo piccoli e leggeri, i due veicoli hanno una scarsa inerzia termica e sono privi di isolamento, quindi sono fortemente esposti alle enormi variazioni termiche quotidiane e stagionali sulla superficie di Ryugu. Tuttavia, adesso che Ryugu si sta riavvicinando al Sole, essi sono usciti da quello stato e, il 2 agosto, sono stati acquisiti nuovi dati di telemetria. Non sappiamo esattamente cosa ne sia emerso ma sembra che i due rover (soprannominati nel frattempo HIBOU e OWL, le parole che in francese e in inglese indicano il gufo) siano in buone condizioni e si sta cercando di pianificare le loro future operazioni. Per l'esattezza, la trasmissione della telemetria ha riguardato il rover 1B/Owl ed è durata 10 minuti.

In alto, i due rover Minerva-II-1 prima del lancio e, sotto, una ricostruzione artistica del loro atterraggio su Ryugu - Credit: JAXA
Un terzo rover, più grande dei precedenti, era rimasto attaccato a una estremità di Hayabusa-2, chiuso nel suo involucro protettivo. Stiamo parlando di MINERVA-II-2, un prisma a base ottagonale largo 15 cm e alto 16, all'incirca il volume complessivo dei suoi due fratelli minori messi insieme. Tra l'altro, questo rover è dotato di una fotocamera nettamente migliore, un sistema Omni-Vision OV-9630 con risoluzione SXGA (1280×1024 pixel), oltre il quadruplo dei pixel presenti su Minerva-II-1. Nei progetti iniziali, sarebbe dovuto scendere su Ryugu qualche settimana dopo i suoi fratelli minori ma, nel frattempo, i piani sono cambiati e si è preferito rimandare l'operazione dopo il secondo touchdown.

Il rover Minerva-II-2 prima del lancio, con il suo contenitore aperto - Credit: JAXA
Questo robot verrà rilasciato tra circa un mese a 1 km di altezza dalla superficie, per poi cadere lentamente, spinto solo dalla debole attrazione di Ryugu e dalla pressione di radiazione solare; la discesa, peraltro, servirà a misurare con precisione il campo gravitazionale dell'asteroide. Prima di poter effettuare una simile operazione, Hayabusa-2 ha bisogno di eseguire una sorta di "prova generale" (rehearsal) rilasciando, sempre dalla stessa altezza, gli ultimi due "Target Markers" (TM) che faranno esattamente lo stesso tragitto di Minerva-II-2. L'operazione dovrebbe essere iniziata in queste ore, come si deduce dall'immagine di apertura che schematizza le fasi salienti dell'operazione (gli orari sono espressi nel fuso orario nipponico, dal quale bisogna sottrarre 7 ore per avere l'ora italiana); naturalmente, appena saranno disponibili nuovi dati di altimetria, posteremo i grafici della discesa sul nostro Mission Log in tempo reale. Come si vede, dopo una lenta discesa discontinua, con lunghe fasi di "caduta libera" (fino a 20 cm/s) intervallate da brevi accensioni dei motori, la mattina del 5 settembre i due marker verranno rilasciati e inizieranno a cadere verso Ryugu, mentre la sonda, tornata nella "Home Position" a 20 km di distanza, li osserverà con entrambe le fotocamere ONC (quella grandangolare e quella telescopica), nelle condizioni di illuminazione migliori, cioè con il Sole alle spalle.

La disposizione dei 5 target markers prima del lancio, con l'indicazione dei loro nomi - Credit: JAXA - Processing: Marco Di Lorenzo
Ricordiamo che i "Target Marker", usati già nella missione "Hayabusa-1" sull'asteroide Itokawa, sono piccoli riferimenti ottici passivi, sotto forma di sfere di 10 cm di lato, riempite di palline di Poliimmide e rivestite di un foglio catarifrangente, in grado di riflettere la luce verso la sorgente; ogni sfera, è dotata di quattro asticelle che si protendono verso l'esterno e che servono a prevenire il rotolamento lontano dal luogo di atterraggio. Hayabusa-2 è partita con ben 5 TM ancorati sotto la sua pancia (figura qui sopra); i primi due a venire rilasciati erano quelli designati dalle lettere B e A (il 25/10/18 e il 30/5/19, rispettivamente), poi è toccato al TM-E il 16 maggio scorso, che ha fornito un prezioso riferimento per l'ultimo touchdown dell' 11 luglio. Adesso tocca agli ultimi due (C e D) che verranno rilasciati a 5 minuti uno dall'altro e impiegheranno 5-6 giorni per cadere e raggiungere la superficie di Ryugu.
Un'altra operazione fondamentale da svolgere, dopo la seconda e ultima raccolta di campioni, era quella di spostare e sigillare il prezioso carico all'interno della capsula di rientro, il piccolo veicolo dotato di scudo termico e paracadute che si staccherà dal corpo principale della sonda ed entrerà nell'atmosfera terrestre alla fine del prossimo anno. Questa delicata operazione è avvenuta con successo il 26 agosto e si è svolta in quattro fasi, illustrate di seguito (rispetto allo schema originale, qui la sequenza è stata semplificata e le didascalie sono state tradotte in italiano):

Le quattro fasi di trasferimento e isolamento dei campioni dentro la capsula di rientro. - Credits: JAXA - Processing: Marco Di Lorenzo
Adesso che i campioni sono stivati nella capsula SRC, l'agenzia spaziale giapponese sta collaborando con il governo australiano per organizzare al meglio l'operazione di recupero. La regione interessata è il deserto piatto della "Woomera Prohibited Area" (WPA) nell'Australia centro-meridionale, dove già si posò la capsula di Hayabusa-1. Il dipartimento della difesa australiano fornirà il supporto necessario per accedere e recuperare la capsula, mentre il "Defence Science and Technology Group" condurrà le attività di cooperazione scientifica con JAXA.
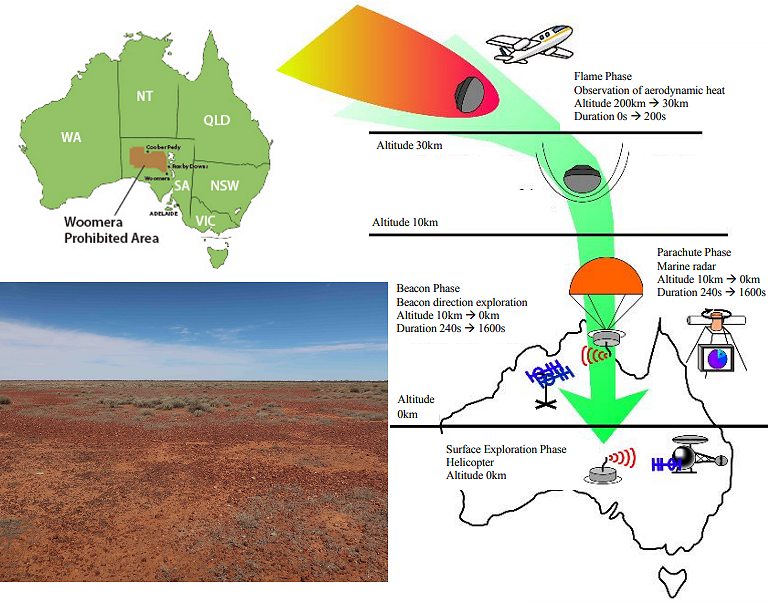
La località e le fasi salienti del rientro della capsula - Credits: JAXA - Processing: Marco Di Lorenzo
A proposito del luogo dell'ultimo touchdown, ribattezzato ‘Uchide-no-Kozuchi’, sono stati annunciati i nomi ufficiali anche per il cratere artificiale e per i massi più grandi al suo interno:
- Cratere Omusubi-Kororin (già cratere SCI) dal racconto popolare della "palla di riso rotolante", in riferimento ai massi al suo interno.
- Masso di Iijima (Moved rock), in memoria del dott. Yuichi Iijima, che ha lavorato allo sviluppo del progetto Hayabusa2 ed è deceduto nel 2012.
- Masso di Okamoto (Immobile rock) in memoria del dott. Chisato Okamoto, che ha contribuito agli esperimenti di raccolta dei campioni ed è deceduto nel luglio 2018.
- Masso di Onigiri (Large boulder) è appunto una palla di riso giapponese che ne ricorda la forma.

A sinistra, una nuova immagine "di contesto", scattata il 25 luglio dalla ONC-T da 5 km, in condizioni favorevoli di illuminazione; la freccia verde indica il punto in cui è avvenuto il secondo touchdown mentre il rettangolo rosso, ingrandito a destra, mostra il cratere artificiale con le nuove denominazioni - Image credit: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST - Processing: Marco Di Lorenzo
Fonti:
Hayabusa2_Press20190822_ver12_en.pdf
https://7905d1c4e12c54933a44d19fcd5f9356-gdprlock













