


L'ultima operazione del "falco" giapponese è iniziata sabato pomeriggio, alle 17:30 italiane; come brevemente comunicato in un tweet, e come preannunciato in una conferenza stampa tenutasi il 24 settembre, Hayabusa-2 ha acceso i motori abbandonando la "Home Position" a 20 km da Ryugu, posizione in cui era rimasta per 10 giorni dopo la precedente manovra di "Target Marker separation" avvenuta tra il 12 e il 17 settembre.
Alle 16:30 italiane di oggi, la sonda si trovava a circa 12,1 km di altezza, a una velocità di 4-5 cm/s. Qui sotto, vediamo il grafico dell'altezza e della velocità verticale di Hayabusa in tempo reale, misurata dal LIDAR; è aggiornato alla mattina del 1 Ottobre mentre i prossimi progressi saranno visibili sul Mission Log dedicato.

Altezza e velocità durante la discesa - Data source: JAXA/Luca Cassioli - Processing: Marco Di Lorenzo
Scopo della precedente manovra, come si ricorderà, era il rilascio degli ultimi due "bersagli" (Target Markers) da 1 km di altezza, per studiare la loro caduta nel tenue campo gravitazionale dell'asteroide. Questa manovra, inizialmente prevista per il 5 settembre, era stata rinviata in quanto la sonda era andata in "Safe-Hold" a causa di un problema ad una delle quattro 'reaction wheel', ingranaggi essenziali nel controllo dell'assetto attraverso le variazioni di velocità di rotazione di 3 volani i cui assi sono orientati in direzioni tra loro ortogonali. Il problema è stato rapidamente risolto e, in ogni caso, la sonda è dotata di una quarta "ruota di scorta" per il principio di "ridondanza" che è una regola d'oro nelle missioni spaziali, come mostrato in queste immagini tratte dall'ultima conferenza stampa.

Le quattro reaction Wheel a bordo di Hayabusa-2 e la loro collocazione nella sonda - Credits: JAXA - Processing: Marco Di Lorenzo
Come si vede nella immagine di apertura, il rover dovrebbe venire rilasciato a una distanza di 1 km da Ryugu la mattina di giovedi (tra le 7 e le 9 italiane) e dovrebbe impiegare ben 5 giorni prima di posarsi sull'asteroide, dopo avere inanellato attorno ad esso una decina di rivoluzioni attorno all'equatore; non si tratta di vere orbite ma di una traiettoria spalleggiante, combinazione di una caduta libera e della rotazione di Ryugu, come mostrato nella seguente slide. Nel frattempo, Hayabusa-2 lo osserverà da una distanza di 8-10 km.
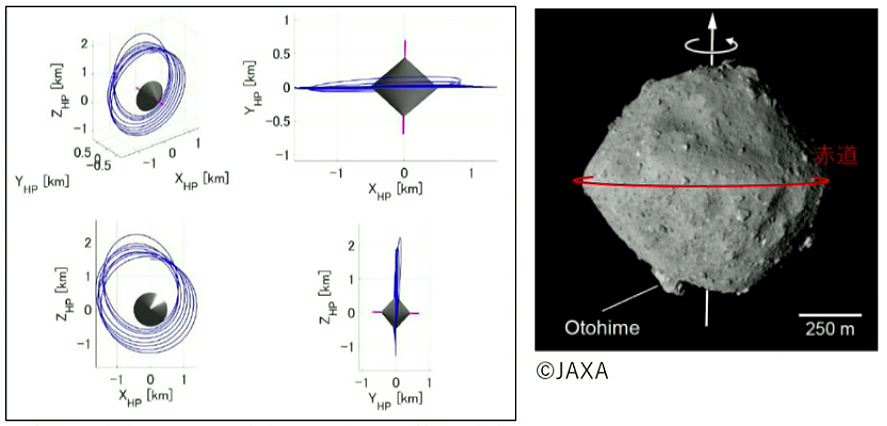
Credits: JAXA - Processing: Marco Di Lorenzo
Il mini-rover che verrà rilasciato è, lo ricordiamo, grande il doppio dei due Minerva rilasciati in precedenza, ed ha la forma di un prisma ottagonale di 15x14,5 cm; costruito da un consorzio di università nipponiche, ha una massa di 877 grammi e i pannelli solari di cui è rivestito erogano circa 2 Watts. Tra i quattro strumenti a bordo, c'è una telecamera con una risoluzione migliore di quelle dei suoi predecessori, mentre un volano asimmetrico le consentirà di muoversi sulla superficie di Ryugu effettuando ampi salti e una serie di piccole protuberanze gli permetteranno di rimbalzare senza subire danni e consentiranno anche di misurare direttamente la temperatura del suolo. Ulteriori dettagli li forniremo quando uscirà la versione in inglese della conferenza stampa...

I quattro rovers rilasciati da Hayabusa-2 - Credits: JAXA - Processing: Marco Di Lorenzo
- Materiale della sessione di briefing (in giapponese):
-
Briefing stampa dell'asteroide Explorer “Hayabusa 2” (24 settembre 2019)
-
Operazione di separazione Rover 2 MINERVA-II2













