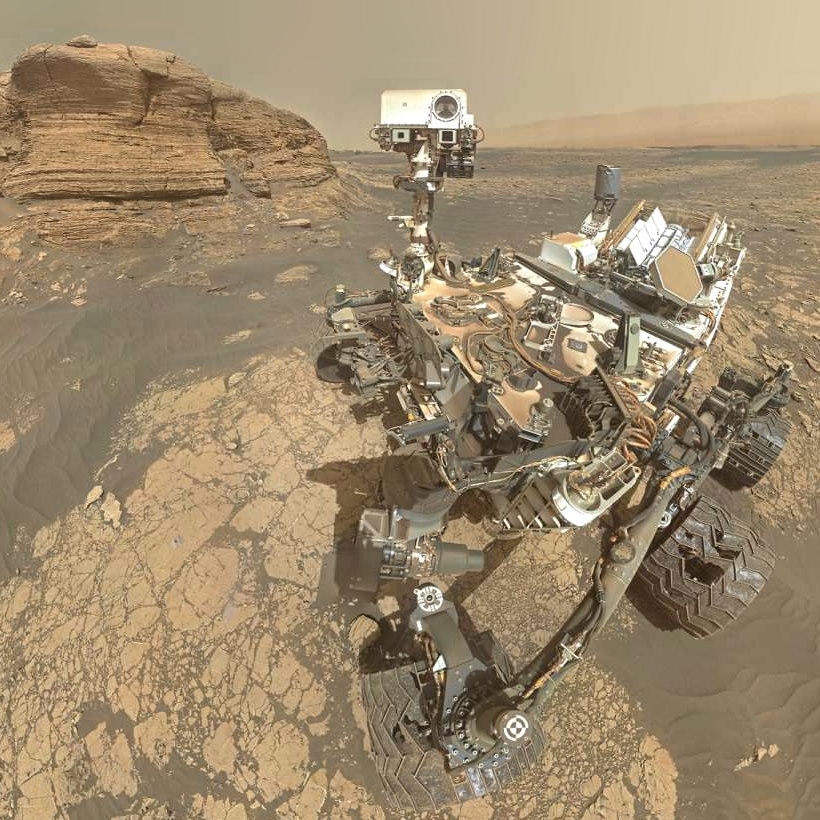
Il MAHLI (Mars Hand Lens Imager), oltre a raccogliere macro delle rocce marziane, essendo posizionato sul braccio robotico, viene spesso utilizzato per controllare lo stato di salute del rover, scattando immagini alle ruote e al ponte di Curiosity.

Curiosity wheel sol 463 detail
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
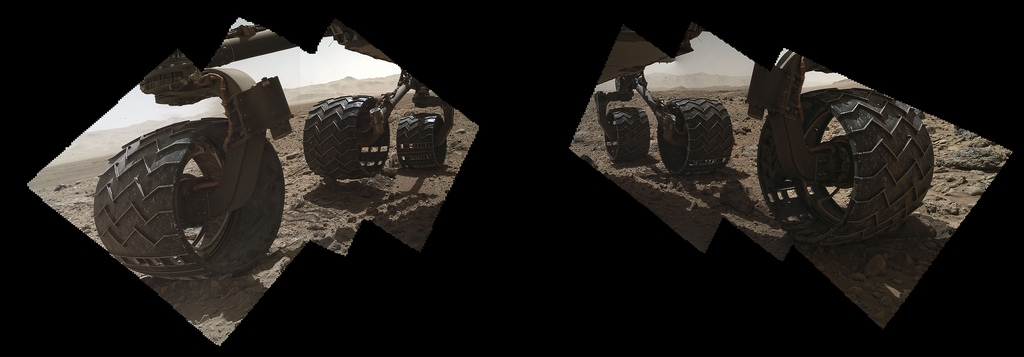
Solo dopo 60 sol di missione, le foto mostravano evidenti punzonature sul rivestimento delle ruote ma ad ottobre 2013, sono apparsi dei veri e propri fori effetto lattina strappata.

CURIOSITY sol 60 MAHLI dent on wheel
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44

Curiosity 0411MH0262000000E1_DXXX detail wheel crack
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
Da allora, più di una volta, la NASA ha assicurato che queste fessure non compromettono in alcun modo la capacità di guida di Curiosity. Eppure qualche lieve preoccupazione la devono pur causare, se dagli ultimi aggiornamenti del sito USGS leggiamo:
"There was some concern about tears in the rover wheels, but today we got the go-ahead to drive, with no restrictions on distance or drive mode. The tears in the wheels were expected based on testing, and the wheels are designed to survive such damage without affecting mobility."
In effetti, è vero, le ruote di Curiosity sono state progettate per continuare a lavorare anche se danneggiate.
Siamo convinti peraltro che, nonostante ogni missione, anche quella a budget più elevato, debba necessariamente trovare dei compromessi tra la scelta dei materiali, le loro caratteristiche meccaniche, il peso della sonda e i costi, per Curiosity ogni dettaglio sia stato opportunamente valutato.
Grazie alle immagini ed ai dati orbitali, gli ingegneri sapevano con buona approssimazione quale terreno avrebbe dovuto affrontare il rover e in quali condizioni ambientali.
Anche se, come vedremo, strappi nel rivestimento delle ruote sono stati contemplati fin dai primi test a Terra, ci chiediamo se Curiosity riuscirà ad affrontare il programma: il terreno che ora ha di fronte non è affatto semplice e manca ancora la parte più impegnativa, la parziale scalata sulle pendici del monte Sharp.

Curiosity sol 437 MastCam left
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
Questo quesito coinvolge un gran numero di discipline, dalla geologia, alla meccanica, all'ingegneria dei materiali, fino alle scienze planetarie e noi di certo non siamo all'altezza di affrontare un discorso così vasto.
Vogliamo, però, provare a fare il punto della situazione insieme a voi., step by step, raccogliendo in questo post tutte le informazioni utili per analizzare il problema.
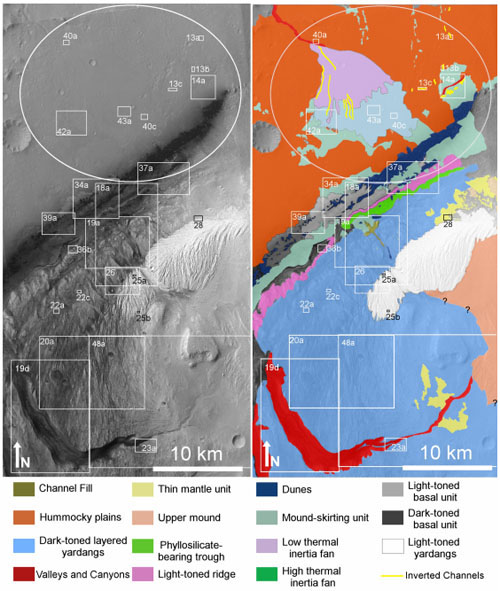
Il cratere Gale
Curiosity è al lavoro nel cratere Gale, situato 5°24'00"S 137°48'36"E, un grande cratere di 155 chilometri di diametro con al centro un tumulo di materiale di oltre 5 chilometri di altezza, il monte Sharp.
E' un cratere molto antico, del periodo Noachiano (3.800 - 3.500 milioni di anni fa), circondato da creste sinuose disegnate da canali fluviali che confluiscono verso l'interno.
Il terreno è per lo più sedimentario (lavico, eolico, fluviale) e il cratere appare oggi solo parzialmente riempito, esponendo l'antica geologia marziana, motivo per cui è stato scelto come meta di una missione.
Il tumulo centrale, del periodo Noachiano / Esperiano (3.500 - 1.800 milioni di anni fa), da un lato, è più alto del bordo stesso del cratere e questo potrebbe significare che l'interno del Gale ha anche subito processi di erosione.
Di sabbia ce n'è poca e quella che c'è ha una granulometria abbastanza grande.

Sorce: Aeolian processes and dune morphology in Gale Crater
I venti devono aver giocato perciò un ruolo fondamentale nella modellazione del cratere.
Anche se le teorie sulla formazione del monte Sharp sono diverse, tra cui quella eolica, l'aria deve essersi creata un vero e proprio percorso, trasportando il materiale più fine fuori dal Gale.
Curiosity è atterrato su un terreno molto antico di conglomerati cementati e stratificati, abbastanza morbido all'erosione ma sufficientemente rigido e compatto.
Immaginiamo, tra l'altro, che ora il suolo sia ancora più duro e consistente a causa delle basse temperature, ormai abbondantemente al di sotto dello zero per l'arrivo dell'inverno marziano.
Sorce: Aeolian processes and dune morphology in Gale Crater
Le ruote
 Per ogni tipo di terreno esiste una ruota ad hoc.
Per ogni tipo di terreno esiste una ruota ad hoc.
Quelle di Curiosity sono state progettate per essere flessibili, anche perché hanno dovuto sopportare la fase di atterraggio (non dimentichiamo che Curiosity non è arrivato su Marte imbozzolato come i suoi predecessori ma è stato direttamente rilasciato sul terreno dallo Sky Crane).
Ruote di questo tipo, tenderanno a subire sensibili deformazioni su terreni rigidi.
Il rivestimento è in alluminio lavorato, con mozzo ed elementi di collegamento in titanio.
Come nel caso degli altri rover, il peso di Curiosity è distribuito su sei ruote ma con qualche differenza in termini di numeri.
I MER Spirit e Opportunity sono all’incirca 2,3 metri di lunghezza,1,6 metri per di larghezza, 1,5 metri di altezza, con un peso di 180 chilogrammi distribuito su sei ruote (circa 30 chilogrammi per ruota).
Curiosity, invece, è decisamente più grande e pesante: lungo 2,9 metri, largo 2,7 metri e alto 2,2 metri, per un peso complessivo pari a 899 chilogrammi (circa 150 chilogrammi per ruota).
Le ruote dei rover Spirit ed Opportunity sono di soli 25 centimetri, contro i 50 centimetri di diametro di quelle di Curiosity.
La gravità su Marte è meno della metà di quella terrestre, 0,38 per l'esattezza, quindi ovviamente anche i rover pesano meno: Spirit e Opportunity arrivano ad appena 68 chilogrammi circa mentre Curiosity pesa comunque 339 chilogrammi circa, ripartiti sulle sei ruote.


Mars Exploration Rover (MER), Sojourner (Mars Pathfinder mission) and Mars Science Laboratory
Ogni ruota ha il suo motore e quelle anteriori e posteriori hanno anche la possibilità di sterzare indipendentemente, permettendo al rover di ruotare sul posto.
Il sistema di sospensione è un “rocker-bogie”, già utilizzato su Spirit, Opportunity e Pathfinder.
Questo sistema permette al rover di rotolare su grandi rocce e avvallamenti senza ribaltarsi.

Credit: Image and Model © 2012 Keith Enevoldsen
Il termine "rocker", dondolo, deriva dal disegno del differenziale (la barra orizzontale sopra il dorso del rover) che ha in effetti l'aspetto di un bilancere collegato al meccanismo laterale di sospensione.
Il termine "bogie", carrello, deriva dai vecchi sistemi ferroviari e si riferisce ai collegamenti all'estremità della ruota motrice.
Il design rocker-bogie non ha né molle né semiassi, permettendo al rover di scavalcare ostacoli fino a due volte il diametro della ruota, mantenendo il contatto con il terreno con tutte e sei le ruote.
I Mars Exploration Rovers non usavano un barra differenziale perché avrebbe interferito con i pannelli solari ma Curiosity non ha questo problema e con tale configurazione, riesce a salire ripide colline fino ad una pendenza di 45 gradi (anche se i sensori lo fanno fermare a 30).
C'è anche un'altra differenza.
Nei MER il sistema di sospensione è legato direttamente alla ruota e interagisce con il corpo del rover, mentre per Curiosity il sistema di collegamento con la ruota è un po' più articolato, formato da una sorta di barre di torsione disposte a raggera (radial stiffness), che conferiscono più rigidità ma anche elasticità al sistema.
Le ruote di Curiosity hanno dei "tacchetti", simile a quelli delle scarpe da calcio dei giocatori.
Queste nervature forniscono aderenza e impediscono al rover di scivolare sia nelle arrampicate sulle rocce più dure che sulle colline di sabbia soffice.
Sono state progettate tenendo conto della velocità media del rover e della capacità di espellere materiale, con buone prestazioni sia su terreni sabbiosi che duri. Un po' come il battistrada intagliato delle ruote delle autovetture: maggiore è il tasso d'intaglio (rapporto vuoti/pieni) e maggiore è la capacità del battistrada di drenare l'acqua.
Naturalmente questo disegno dovrebbe tornare utile anche nel caso in cui la ruota sprofondi nella sabbia come era successo al povero Spirit ad Home Plate.

Le ruote hanno anche dei fori nel loro design, non necessari da un punto di vista strutturale ma utilizzati dal team come marcatori di odometria visuale.
Dato che in questo caso, gli ingegneri non erano legati ad una forma precisa, hanno ben pensato di utilizzarli come firma creando la scritta J-P-L in codice morse.

Credit: NASA/JPL-Caltech
Comunque, dove sono stati disegnati i fori, cambia il disegno delle nervature e, anche se non siamo in grado di fare i conti, immaginiamo che lo spessore e la quantità di nervature sia stata studiata per bilanciare il materiale asportato, mantenendo la ruota equilibrata.
Questi fori, in effetti potrebbero anche tornare utili per espellere materiale accumulato all'interno della ruota stessa.
E i test a Terra in fase di progettazione e realizzazione?
In rete si trovano diverse foto e video, purtroppo però pochi dati tecnici sulle prove effettuate.
Sappiamo che sul banco di prova del JPL, le ruote sono state sottoposte ai test con un peso pari a tre volte quello del rover, sono state ammaccate, perforate, strappate eppure hanno continuato a lavorare.
Abbiamo selezionato, a titolo di esempio, la seguente immagine e filmato.

Credit: Patrick T. Fallon / Los Angeles Times / June 22, 2012
C'è anche un altro scatto significativo, postato da Doug Ellison, che sembra abbia assistito a qualche test, sul forum unmannedspaceflight.com. Qui la ruota appare seriamente danneggiata: non solo il rivestimento si è aperto in vari punti ma è saltato anche un pezzo di nervatura.

Doug assicura:
"And the wheels got a lot worse than that before they were replaced. A LOT worse."
("E le ruote sono state molto peggio prima di essere sostituite. MOLTO peggio")
Considerazioni finali
Tutta la tecnologia di Curiosity è affidata alle ruote che, nella missione reale, sono elementi insostituibili e come tali meritano tutta l'attenzione necessaria.
Purtroppo senza conoscere le condizioni in cui sono stati condotti i test e senza dati alla mano, rimane difficile valutare la situazione attuale.
Immaginiamo, comunque, che le ruote malconce delle prove a Terra siano state sottoposte a stress ben superiori a quelli richiesti dalla missione, sia per variazioni climatiche che in termini meccanici.
Quindi, forse, qualche danno alle ruote di Curiosity era in programma ma confrontando le immagini del MAHLI con quelle dei test, ci chiediamo se questa problematica non si sia manifestata troppo precocemente.
Non sappiamo l'usura simulata a Terra a quanti sol di missione possa corrispondere, non sappiamo le ruote così ridotte quanto hanno lavorato ancora.
Inoltre, ipotizzando che Curiosity possa gestire questa condizione ancora per molto tempo, supponiamo che ogni fessura in più possa rappresentare un potenziale punto debole. Quelli che vediamo non sono fori regolari ma strappi, in cui l'alluminio è rimasto alzato. Al loro interno potrebbe incastrarsi una piccola roccia marziana comunque in grado di causare qualche problema alla stabilità del rover (basta pensare all'attenzione che viene posta quando Curiosity deve estendere il suo braccio robotico).
D'altra parte la missione primaria è stata progettata per durare un anno marziano (668 sol), ossia 23 mesi terrestri (quasi due anni), per cui in un certo senso ha quasi raggiunto l'obiettivo, ma l'alimentazione nucleare del rover potrebbe proseguire per almeno 14 anni.
Se la missione dovesse interrompersi a causa delle ruote sarebbe un vero peccato: il longevo rover Opportunity, che il prossimo gennaio compirà 10 anni su Marte, sta facendo le migliori scoperte proprio durante la sua missione estesa .
Riferimenti:
- http://www.spaceflight101.com/uploads/6/4/0/6/6406961/anderson_mars_2010_00041.pdf
- http://www.psi.edu/sites/default/files/images/Seminar/staff/mbourke/Hobbs.pdf
- http://marsoweb.nas.nasa.gov/landingsites/msl/workshops/4th_workshop/talks/5_Edgett_Gale_opt.pdf
- http://trs-new.jpl.nasa.gov/dspace/bitstream/2014/42424/1/12-0690.pdf
- http://www.jpl.nasa.gov/news/news.php?release=2010-221
- http://en.wikipedia.org/wiki/Rocker-bogie
- http://spaceodyssey.dmns.org/missionsobservatories/spacecraft-missions/mars-science-laboratory.aspxhttp://marsrover.nasa.gov/mission/spacecraft_rover_wheels.html