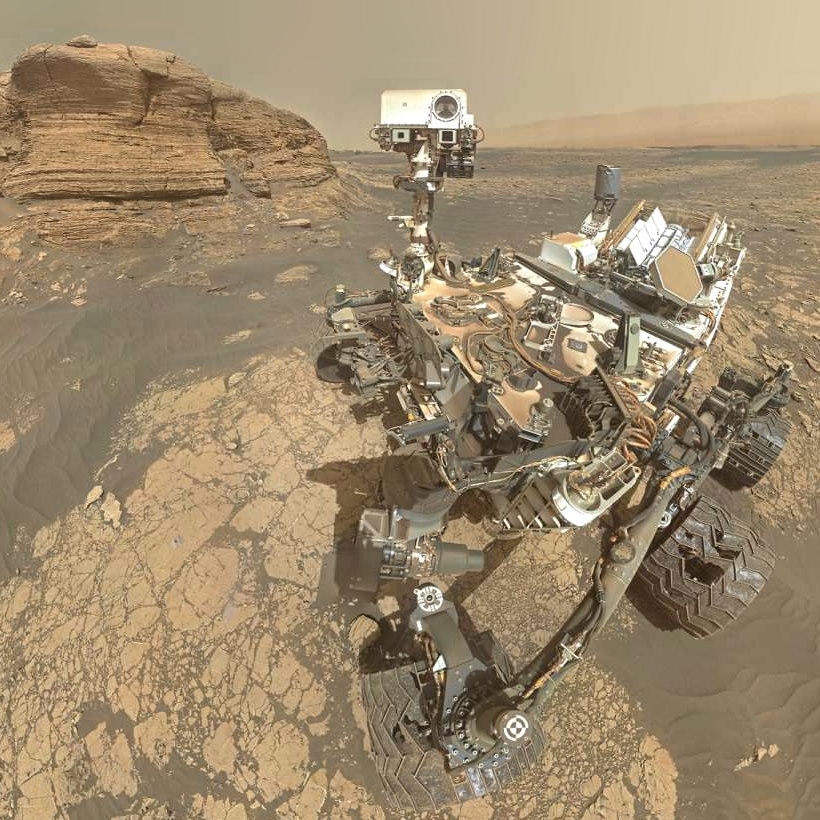
Curiosity sol 674 NavCam
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
Erano le 7:32 ora italiana del 6 agosto 2012 quando Curiosity, il rover più avanzato mai costruito, ha toccato il suolo di Marte, tenendo sulle spine non solo il team di missione ma anche un grande pubblico di appassionati che, come me, ha seguito l'evento incollato alla diretta via web.

Curiosity Sol 0 Mars Descent Imager Anaglyph 0000MD9999000035E1_DXXX 036E1_DXXX
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
Durante il suo primo anno di attività, aveva già raggiunto l'obiettivo primario della missione, ossia stabilire se Marte avesse mai offerto condizioni favorevoli alla vita microbica.
 Le rocce sedimentarie argillose sul pavimento del cratere Gale, nella zona di Yellowknife Bay, hanno dimostrato che miliari di anni fa lì scorreva acqua liquida fresca e dolce, una ambiente neutro in grado di creare le condizioni essenziali per la vita.
Le rocce sedimentarie argillose sul pavimento del cratere Gale, nella zona di Yellowknife Bay, hanno dimostrato che miliari di anni fa lì scorreva acqua liquida fresca e dolce, una ambiente neutro in grado di creare le condizioni essenziali per la vita.
La conferma era arrivata dalle analisi del primo campione di roccia marziana raccolto dal rover su John Klein, che aveva mostrato, per la prima volta, Marte di un colore diverso, quello ormai celato dalla patina rossastra di particelle ferrose ossidate che avvolge il pianeta.
"Prima di atterrare, ci aspettavamo che ci sarebbe stato bisogno di guidare molto più lontano per rispondere a questa domanda sull'abitabilità", ha detto John Grotzinger, Project Scientist di missione, del California Institute of Technology, Pasadena.
"Abbiamo potuto approfittare di un atterraggio molto vicino ad un antico alveo e ad un lago. Ora vogliamo saperne di più su come le condizioni ambientali di Marte si sono evolute e sappiamo dove andare a cercare".
Durante il suo secondo anno sul Pianeta Rosso, Curiosity ha guidato verso la meta prevista, le pendici del monte Sharp, il tumulo alto 5,5 chilometri al centro del cratere Gale.
")
Curiosity sol 610 - Monte Sharp e Monte Remarkable (a sinistra)
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
Il target è una zona a circa 3 chilometri a sud ovest rispetto alla posizione attuale del rover, chiamata Murray Buttes, dove la geologia presenta diverse stratificazioni esposte ma, un affioramento chiamto "Pahrump Hills", a meno di 500 metri, offrirà un'interessante anticipazione.
Nella mappa, la stella celeste in alto a destra indica "Bradbury Landing", il luogo di atterraggio e la linea bianca mostra il percorso pianificato nella primavera del 2014.

Credit: NASA/JPL-Caltech/Univ. of Arizona/USGS
I danni alle ruote apparsi ad ottobre 2013, hanno indotto un cambio di rotta e una revisione del tragitto: l'ultimo, quello rappresentato nel grafico, è quindi anche la strada più sicura per il rover.

Curiosity MAHLI sol 692
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44
Fori e punzonature erano contemplati ma si sono presentati più precocemente del previsto tanto che gli ingegneri hanno dovuto adottare qualche escamotage per contenere il tasso di usura, come guidare all'indietro.
L'inconveniente si è manifestato a causa di un suolo particolarmente duro e tagliente, mai incontrato prima d'ora su Marte.
I danni hanno interessato le ruote in modo diverso: ad esempio, ci sono delle forature nel rivestimento tra le "costole", ossia quelle barre più spesse a zig zag che migliorano la presa sul terreno. Dai fori, poi, nascono delle crepe di forma diversa e in più direzioni. E il danno varia da ruota a ruota.
Questo problema, ormai, non può essere eliminato ma ridotto ed è per questo che il team ha iniziato ad esaminare più scrupolosamente il paesaggio, alla ricerca dei percorsi più morbidi, magari ricoperti da un velo di sabbia.
Ancora più attenzione dovrà essere posta nei prossimi sol, ora che Curiosity è uscito dall'ellisse di atterraggio (sol 672), ossia l'area di 7 per 20 chilometri più sicura e pianeggiate che era stata selezionata per il landing di due anni fa.
La fotocamera High Resolution Imaging Science Experiment (HiRISE) della sonda Mars Reconnaissance Orbiter (MRO) aveva fotografato il rover proprio sul confine il 27 giugno 2014.

Credit: NASA/JPL-Caltech/Univ. of Arizona
Un'altra sfida per il team di missione è comparsa a fine luglio, a causa di un comportamento imprevisto del computer side-A di bordo attualmente in servizio come backup.
Curiosity dispone di una coppia di computer principali ridondanti, in modo da avere un backup disponibile se uno di questi dovesse fallire. Ognuno dei computer, side-A e side-B, a loro volta, hanno altri sottosistemi duplicati di sicurezza.
Ora, il rover sta utilizzando, come principale, il computer side-B in quanto un problema con il computer side-A, manifestatosi il 28 febbraio 2013, aveva spinto gli ingegneri ad invertire la situazione utilizzando side-A come backup, comunque, ancora considerato affidabile.
Il mese scorso, Curiosity ha praticamente guidato (potete trovare gli ultimi dati nella nuova sezione curata da Marco Di Lorenzo), ed ora sta entrando in una zona sabbiosa, chiamata "Hidden Valley", dove le ruote potranno beneficiare di un po' di terreno soffice.

Credit: NASA/JPL-Caltech/Univ. of Arizona

Curiosity sol 692 NavCam - Hidden Valley
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44

Curiosity sol 703 MastCam R - Hidden Valley
"Courtesy NASA/JPL-Caltech" processing 2di7 & titanio44